

用陀螺仪与倾斜传感器,数字三轴角度仪测量快又准
传统的角度测量仪有液体及玻璃装置,整体结构体积庞大,使用不当容易发生破裂状况,因此产品寿命较短,而且在使用上必须要等到气泡到达平衡位置才可观察正确的角度,测量过程不仅耗时且精度较低;而目测式的角度测量仪无法产传统角度测量仪因结构不稳定,容易造成量测误差。数字三轴角度仪由于导入陀螺仪及倾斜传感器,可感知倾斜面角度的变化并据此输出不同的电压值,再透过电压值的大小反推平台倾斜的角度,达到高效准确的量测目的,改善传统角度测量仪缺点。
生电子讯号来控制其它组件,即使以水银液滴来取代气泡,藉由电路整合转成电子式的讯号输出,也会因为结构的不稳定产生角度量测上的误差,因此本文将以其它方式来测量平台的倾斜角,改善传统角度测量仪缺点。
为改善传统角度测量仪的缺点,可利用三轴加速度计(Accelerometer)测量平台的倾斜角度,当测量仪放置在倾斜面时,三轴重力加速度会因倾斜面角度的改变而输出不同的电压值,且电压值与角度呈现比例关系,因此可藉由电压值的大小反推平台倾斜的角度,透过单芯片的应用,将三轴加速度计的输出电压转换成角度显示在液晶显示器(LCD)上,使用者即可知道平台倾斜的角度,甚至可测量平面的水平度。
精密陀螺仪加持 倾斜传感器性能升级
由于许多如汽车、飞机、机械平台等自动化设备,都须要测量设备本身倾斜的角度并将测量的结果回馈(Feedback)给控制系统,让系统内部的程序做出适当的响应,因此,高精度倾斜传感器(High-precision Tilt Sensor)是现代化科技发展不可或缺的零组件,尤其在建筑产业的应用是更为广泛。以著名的单人二轮电动滑板车赛格威(Segway)而言,在正常操作下几乎不会倾倒,关键在有精密的陀螺仪及敏锐的倾斜传感器,随时侦测骑乘者身体重心移动的变化,运用微处理器搜集骑乘者数据仿真人体的平衡。
根据工业局分析,国内业者要生产赛格威(Segway)尚有困难,主要是由于关键零组件陀螺仪及倾斜传感器等技术尚待建立。有鉴于此,本文应用力学原理设计高精度倾斜传感器,并使用8位系列芯片作为微控制器(MCU),希望经由这项研究能够提升国内倾斜传感器的技术。
目前大部分传统的倾斜传感器的设计概念,大多以气泡在重力场下的行为作为侦测角度之基础,如图1水平气泡示意图所示。当所测平面产生倾斜时,水银气泡会离开原来的中央位置,而右方或左方的二条金属电极(粗线部分)会发生断路现象,即可判别是右倾或左倾,但此种装置只能判断平面是否保持水平而无法提供角度侦测,仅能做为水平开关。
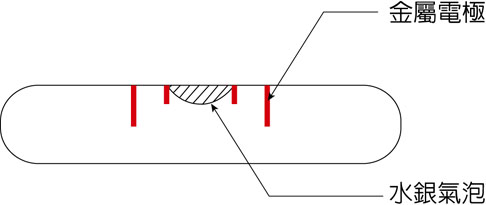
图1水平气泡示意图
如图2水平气泡几何关系图所示,其中S表示气泡移动距离,R表示玻璃管曲面半径,φ表示倾斜角度,则φ=(180×S)/(πR)。在一弧度玻璃管内填充乙醚液体及保留一小气泡于玻璃管中,当倾斜角度发生时,因物理倾斜重力的因素而使其沿着玻璃管弧面移动,管内气泡会往高的一端移动,精度越高的水平气泡,其玻璃的曲率半径会越大,玻璃管上的弧面设计可让气泡永远保持在最高点,再根据玻璃管上的红色刻度线,以目测方式来判读倾斜角。
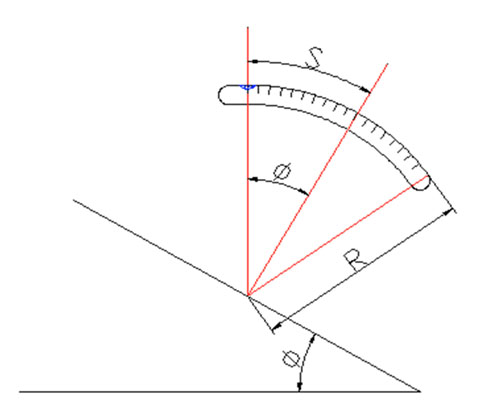
图2水平气泡几何关系图
若将图2中水平气泡上的黑粗线改成金属导线,气泡改成水银液滴,藉由电路整合就可转成电子式的讯号输出。以上所描述为传统角度测量仪的原理,但传统角度测量仪有液体及玻璃装置,整体结构体积庞大,使用不当容易发生破裂状况,因此产品寿命较短,且在使用上须等到气泡达平衡位置才可观察正确角度,测量过程不仅耗时且精度也较低。此外,目测式的角度测量仪亦无法产生电子讯号来控制其它组件,即使以水银液滴来取代气泡,藉由电路整合转成电子式的讯号输出,也会因结构不稳定产生角度量测上的误差,因此必须以其它的方式来测量平台倾斜角,改善传统角度测量仪缺点。
加速度计利用挠曲/电路侦测位移
三轴加速度计是一种测量加速度的装置,加速度计的广泛使用使得自动化工业大幅降低成本。微机电系统(MEMS)加速计最常见于现代汽车的安全气囊系统上,以侦测碰撞发生时车辆突然的减速度。加速度计只由一个悬臂和一个重锤组成,利用挠曲和电路来测量加速度,其工作原理为当加速度计本体产生移动或转动时,使内部互补式金属氧化物半导体(CMOS)微结构产生位移,造成电容值的变化,该电容值再转换为特定输出电压为讯号,藉此让装置做出相对的反应。本研究采用AGB3_V2三轴超小型加速度计,测定范围从1.5~6倍的重力加速度(G),使用防止噪声的电容,内藏放大器(Amp),其接脚结构如图3所示,可直接与微处理器相接。
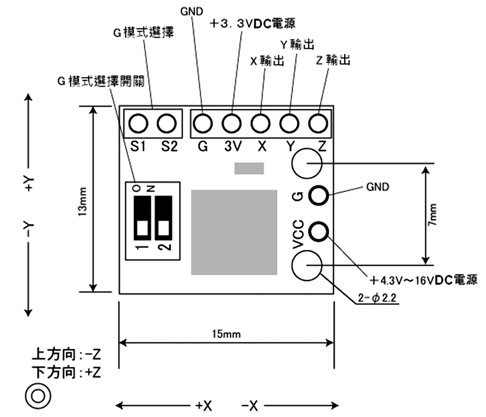
图3加速度计接脚结构图
加速度计输入电源电压是5伏特(V),输出电压最大约3伏特,若选择1.5G模式,输出讯号呈现800毫伏特(mV)/G的线性关系,因此模拟讯号输出电压Vout与0度讯号电压V0、加速度Zg的关系为公式1。
‥‥‥‥‥‥‥‥‥公式1
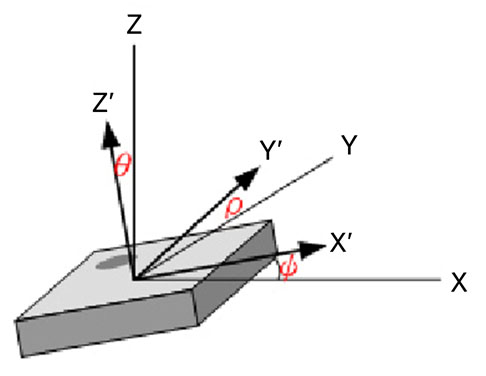
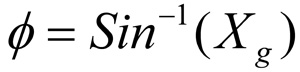
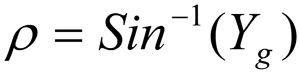
在此例中利用倾斜时的重力关系,可以换算出倾斜角。对于位移而言,由X-Y-Z轴感测到电压变化,可以得到加速度计本体的倾斜角度,如图4所示,以ψ、ρ与θ分别代表X轴、Y轴与Z轴的倾斜角度,加速度Xg、Yg、Zg与倾斜角度之间的关系可由公式2~4描述。

图4加速度计本体的倾斜角度示意图
‥‥‥‥‥‥‥‥‥‥公式2
‥‥‥‥‥‥‥‥‥‥公式3
‥‥‥‥‥‥‥‥‥‥公式4
本例的输入Xg、Yg、Zg与输出倾斜角度讯号ψ、ρ与θ并非线性关系,因此可将输出电压讯号切割成很多个区间来处理,由于Sin函数在零度角(水平)附近,呈现正比线性关系,而且变化较为显著,所以在30度角之前仅分割成三个区间,在30度角与90度角之间则分割成三十个区间,区间内则以线性内插求得,商品化时若考虑到精度问题只须在程序内将区间分割得越细,即可将精度提高到所需要的范围。
此外,输出讯号均为模拟(Analog)的微小讯号,因此必须将讯号放大才能作进一步的处理,同时在一般的应用场合中往往还须要将讯号回馈传送至微控制器中进行运算,因此必须将模拟式的讯号转换成数字式(Digital)的讯号,才能让微电脑读取,这个程序是由模拟数字转换器(Analog to Digital Converter, ADC)来达成。
在软件方面,HT-IDE3000发展系统可提供完善的工作平台。将所有的软件工具,例如编辑器、组译器、连结器、函式库管理员和符号除错器,整合成为一窗口环境,使程序发展过程更为容易。HT-IDE3000软件还提供软件仿真器功能无须接上HT-ICE仿真器,即可进行程序开发。
HT-IDE3000软件仿真器可以仿真8位微控制器,以及所有HT-ICE仿真器之基本功能。利用以HT46R232 MCU为核心之控制器主体搭配一个LCD之讯号输出模块与荷重元量测系统作为输入单元,并规画HT46R232微控制器A埠(Port A)为输出埠,B埠(Port B)为输入埠。其中,基于HT46R232微控制器的控制器主体用来执行逻辑、运算、计时、计数等功能,并透过数字输出或模拟输入模块来进行角度测量动作,本范例的程序流程图如图5所示,其技术来源为作者自行研究的成果,并已提出发明专利的申请。
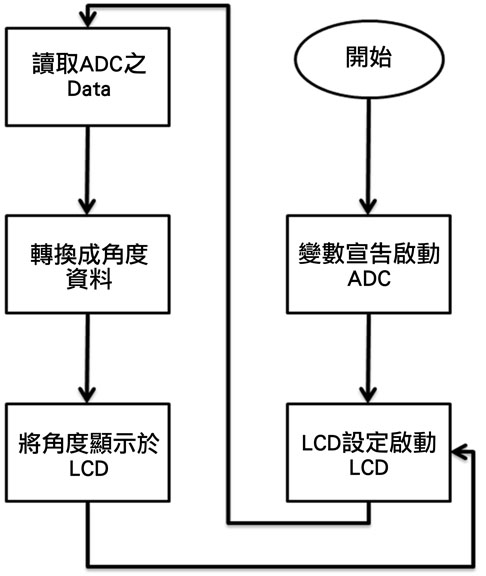
图5本文范例的程序流程图
010-62156134 62169728 13301007825 节假日:13901042484 微信号:sun62169728
地址:北京市西城阜外百万庄扣钟北里7号公寓
E_mail:sales@pc17.com.cn 传真: 010-68328400
京ICP备17023194号-1 公备110108007750